


KDEXF-UAS55




Overview
ESC Programming Device: KDE Direct Device Manager Adapter
The UAS series is compatible with 2S LiPo - 8S LiHV power systems - allowing for the next level of performance and efficiency for your sUAS and Multi-Rotor applications.
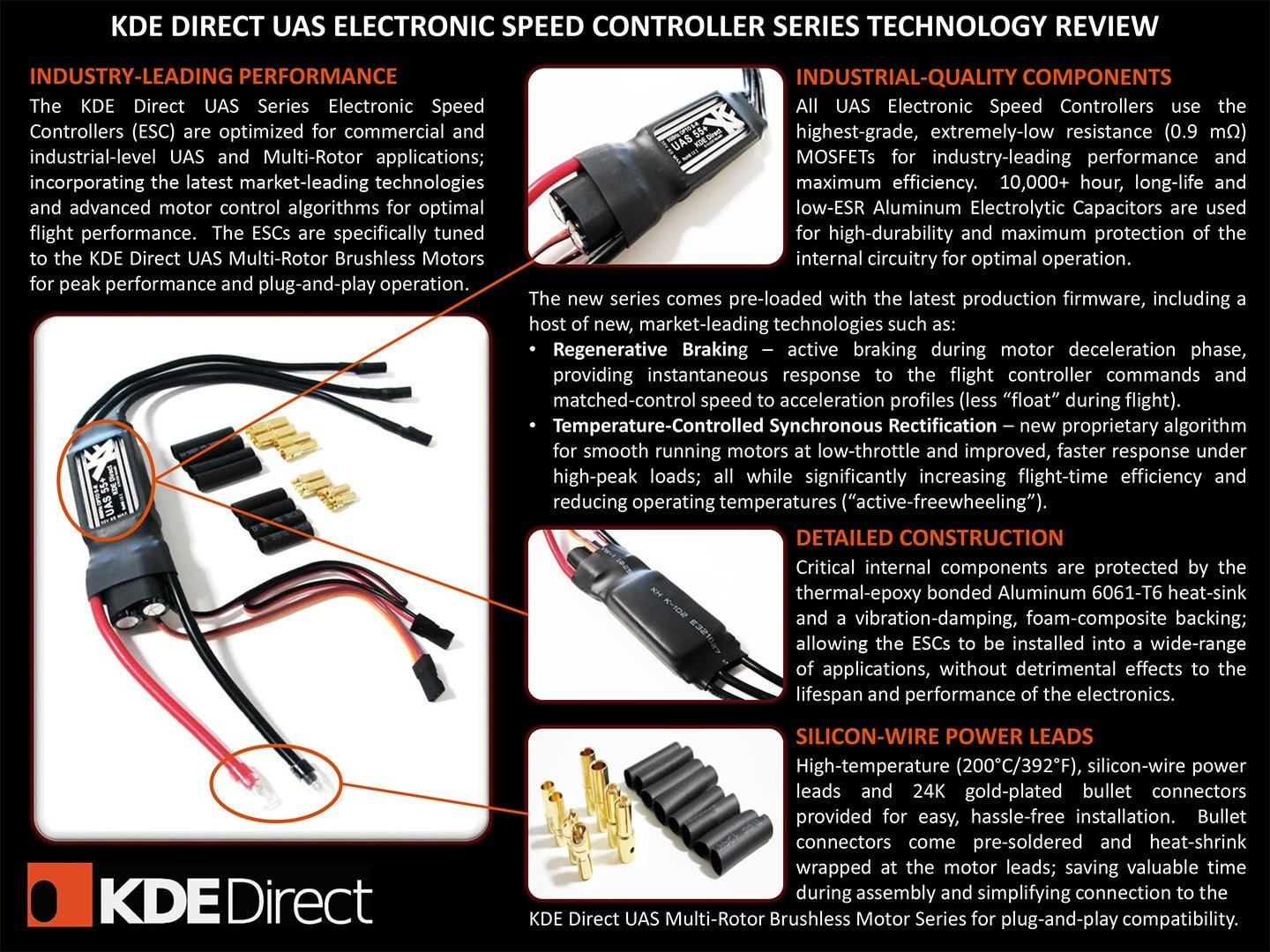
The new series also comes pre-loaded with the latest production firmware, including these new, market-leading technologies:
- Regenerative Braking – active braking during motor deceleration phase, providing instantaneous response to the flight controller commands and matched-response to acceleration profiles (less “float” during flight).
- Temperature Controlled Synchronous Rectification – new proprietary algorithm for smooth-running motors at low-throttle and improved, faster response under high-peak loads; all while significantly increasing flight-time efficiency and reducing operating temperatures (also termed "active-freewheeling").
- Dynamic Timing and Startup Power – optimally-tuned for smooth and precision-controlled startup throughout the full-range of UAS Brushless Motors (no hesitation, stuttering, or response lag).
- Increased Drive and Throttle Frequency Resolution – high-accuracy, linear throttle response throughout full-range of operation control.
- Motor Synchronization – frequency matched start-up protocols for smooth and efficient motor operation.
- Anti-Spark Circuitry – protects the integrity and life-span of critical connectors upon each initial plug-in and system power-up.
- Auto Recognition of PWM Control Signals – factory calibrated, automatic throttle calibration ideal for most applications.
The new KDE Direct UAS Multi-Rotor Electronic Speed Controller (ESC) is optimized for multi-rotor applications and utilize a proprietary algorithm for up to 600Hz refresh rate control and high-speed response to the flight system commands. Dynamic PWM and Motor Advance Timing algorithms are used for optimal flight performance. For maximum stability and performance of the flight controller, the system is tuned to react almost instantaneously to the flight commands and UAS Brushless Motor response capability.
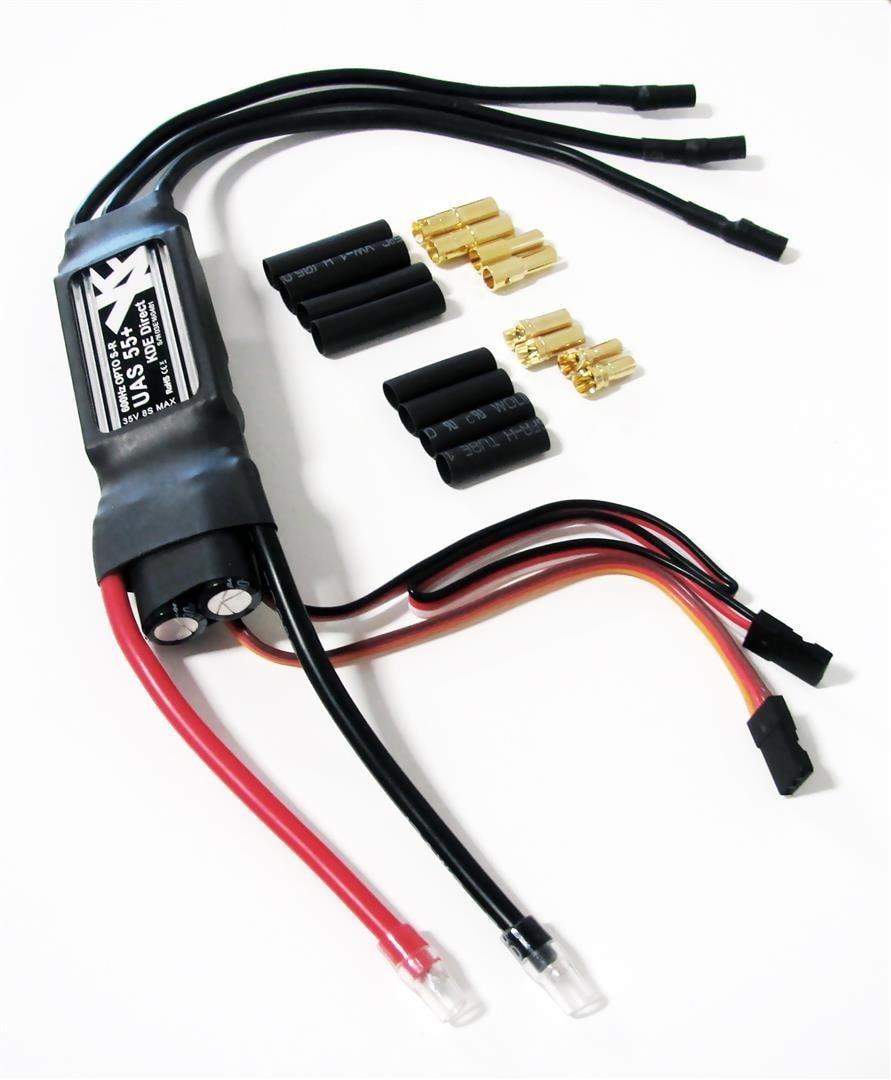
ESCs now include 200°C, 13 AWG silicone-wire power leads and 15 AWG silicone-wire motor leads with dual ф4.0mm (KDEXF-BC40) and ф3.5mm (KDEXF-BC35) 24K matching Bullet Connectors.
Specifications
Programming: Proprietary Control Algorithm, 600Hz+ Refresh, Dynamic Advance Timing
Features: Active Anti-Spark Circuit, Aluminum 6061-T6 Heatsink
Includes:
- Two (2) KDE Direct XF ф3.5mm 24K Bullet Connectors (Pair, KDEXF-BC35)
- Two (2) KDE Direct XF ф4.0mm 24K Bullet Connectors (Pair, KDEXF-BC40)
Full Specifications:
| Not NDAA Compliant | |
| Refresh Rate | 600 Hz (50 - 600Hz Adaptive) |
| Maximum Peak Current | 95 A (5 s) |
| Maximum Peak Power | 2,810 W (5 s) |
| Maximum Continuous Current* | 55 A (180 s) |
| Maximum Continuous Power* | 1,630 W (180 s) |
| Maximum Temperature* | 95°C |
| Maximum DC wire length* | 12 inches |
| Voltage Range | 7.4 V (2S LiPo) - 34.8 V (8S LiHV) |
| Internal BEC | None (Opto-Isolation) |
| Maximum RPM | 360,000 rpm (2-Pole) |
| PWM Rate | Auto Recognition Algorithm |
| Advance Timing | 22° - 30° |
| PCB Size | 25 mm (W) x 58 mm (L) |
| ESC Weight | 32 g (60 g with Wires/Bullets) |
| Power Leads | 13 AWG, 200°C |
| Motor Leads | 15 AWG, 200°C |
| ESC Control Lead | 22 AWG, 3-Wire JR (W-R-B) |
| ESC Programming Lead | 22 AWG, 3-Wire JR (O-R-B) |
| Power Connects | ф3.5 / ф4.0 mm Matched Pair |
| Motor Connects | ф3.5 mm Female |
*: ESC requires consistent airflow (5 mph or greater) across the heatsink to maintain maximum continuous current and power ratings during operation, specified at full-load condition (100% throttle). Increasing airflow or adding additional cooling can further increase the capabilities of the controller and extend the lifespan of the critical internal components.
*: ESC actively monitors internal hardware components to protect its circuitry. Overtemperature protection ensures safe and reliable operation by limiting the maximum RPM when the temperature rises above the maximum temperature rating. Overtemperature protection decreases an ESCs operating temperature and will bring the ESC back to safe operating conditions.
*: Extending the ESC power leads is at your own risk and voids the warranty. Additional capacitance must be added if the DC wire length between the ESC and power source is longer than 12 inches
Manuals & Models
Manuals
- KDEXF-UAS55 Design Geometry Dimensions Specification Sheet (PDF)
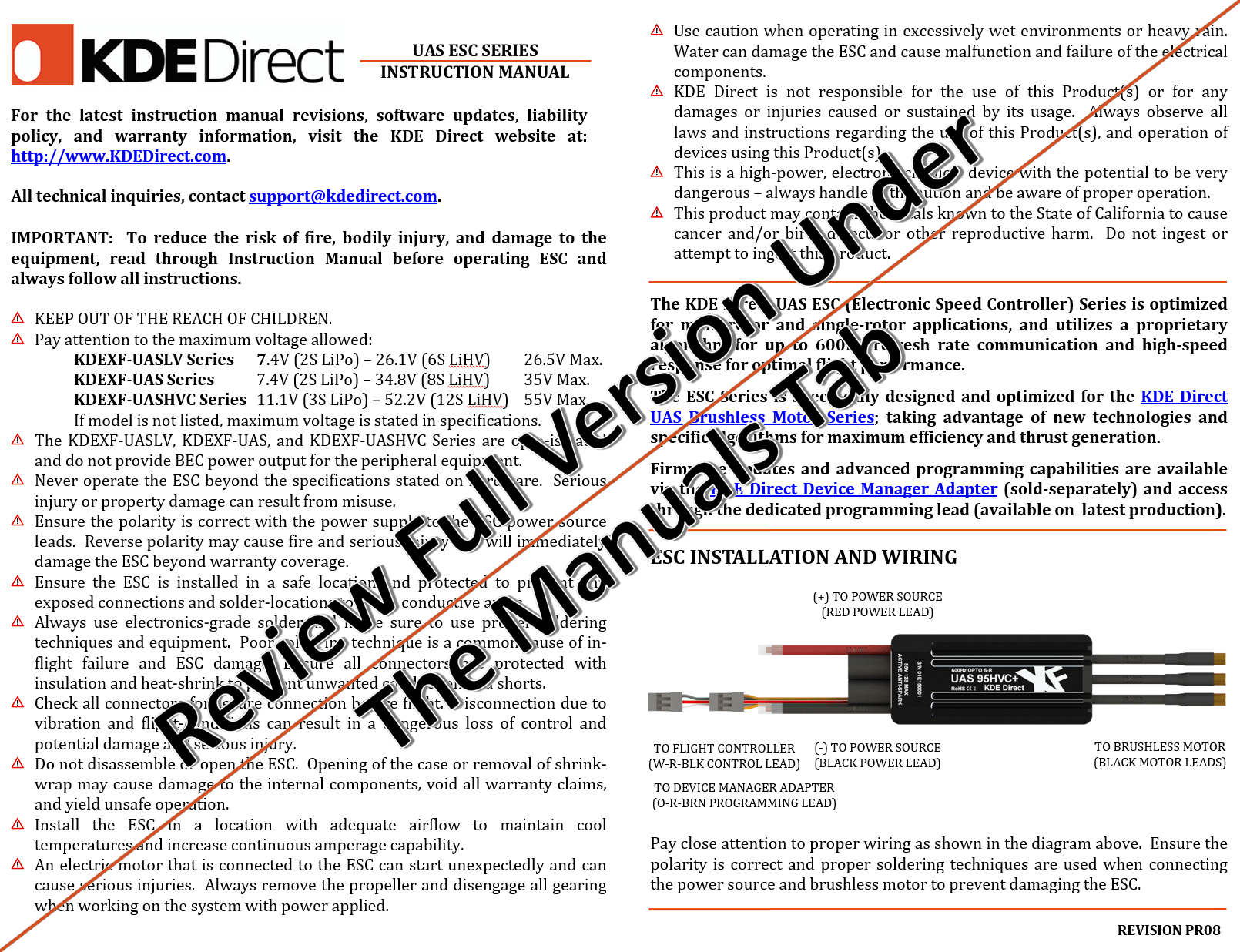
- UAS ESC Series Instruction Manual REVPR13 (PDF)
- UAS ESC Series Technology Review (PDF)
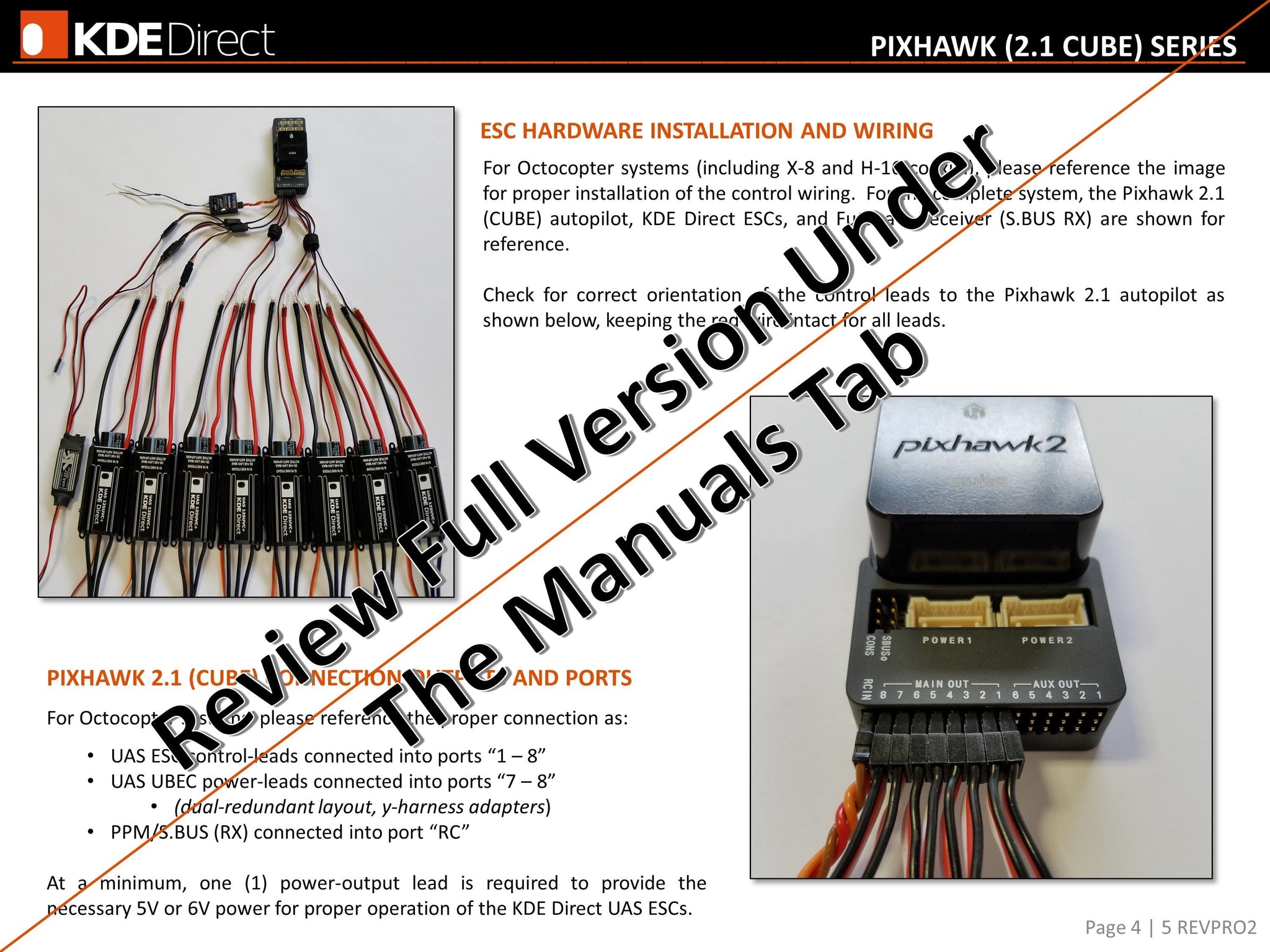
- KDE Direct UAS ESC - Pixhawk 2.1 (CUBE) Autopilot Instructions (PDF)
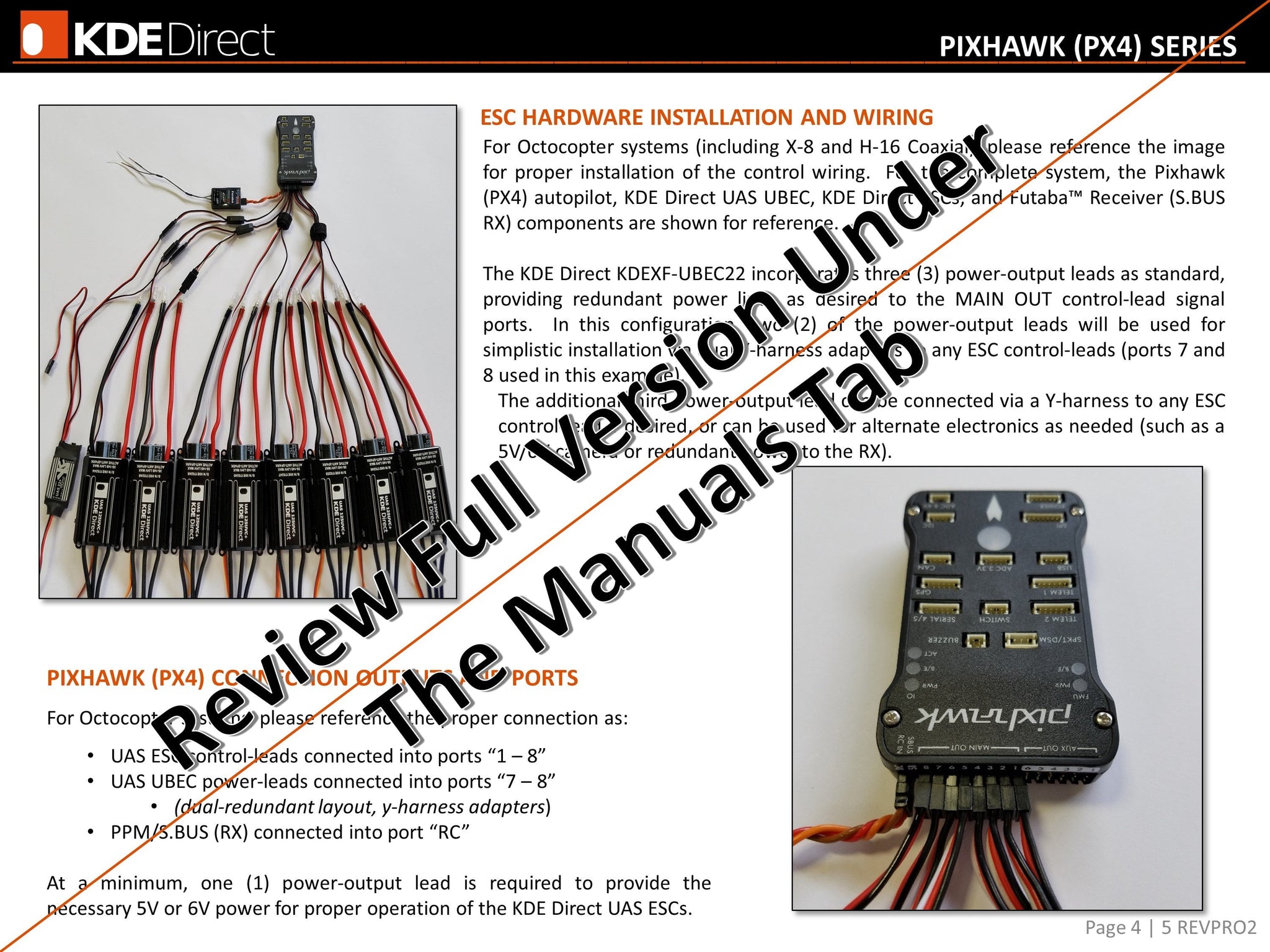
- KDE Direct UAS ESC - Pixhawk (PX4) Autopilot Instructions (PDF)
- KDE Direct Design Engineering - Episode X: XF UAS ESCs (YouTube)
Models


To decompress the files, any reputable unarchiver will work such as WinRAR, 7-Zip, PeaZip, etc.
We Also Recommend